Abstract
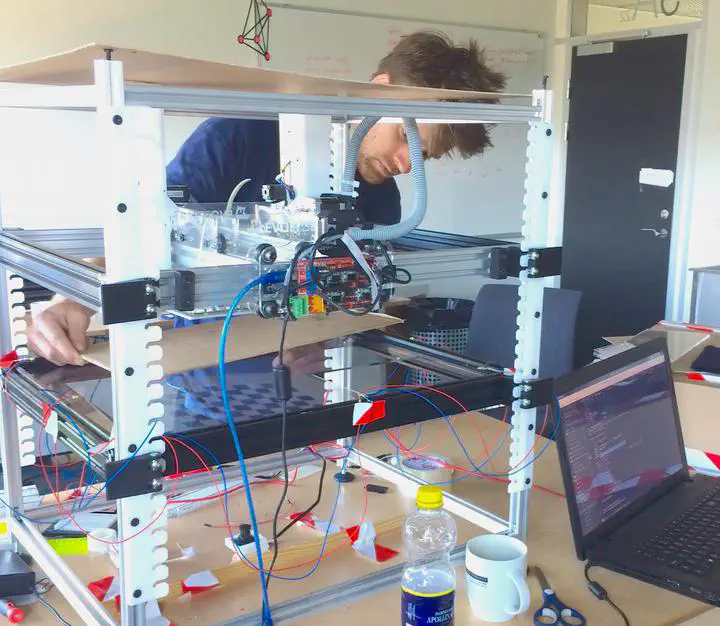
Automated production using robots play a significant role in chemistry, biotechnology and microbiology. Robots that are designed to perform a specific task are in the long run cheaper and much more efficient than humans. In research, however, most tasks are done by humans even though many tasks are cumbersome and repetitive. What complicates the introduction of robots in research are the small variations in the task sequences that are frequently introduced. In this Master thesis we will contribute to a project called the EvoBot which seeks to make robots an integral part of research in order to lower costs and speed up the process of experimenting. We develop a proof-of-concept for a computer vision application for the EvoBot that enables it to find, locate and classify petri dishes and well plates. We present the design of the system implemented using the OpenCV framework along with physical modifications to the EvoBot. In addition to the vision system we develop a framework to test its precision and accuracy and lay ground work for future improvements. We evaluate different approaches based on accuracy and precision results of the detection methods that are experimented with. The evaluation indicates that detection without the use of tagging is feasible for use in the industry, with the introduction of some future improvements.